
十看别克昂科威 《车讯实验室》全方位解析
第四,看看底盘。
昂科威的底盘十分平整,最低点是前悬架附近的固定点,空车状态下,距离地面196毫米,满载状态下,距离地面173毫米。此外,昂科威的前悬长度996毫米,后悬长度921毫米,接近角17度,离去角18度。这两个角度告诉人们,昂科威尽管是SUV,但它的主要舞台依旧是铺装路,越野不是它的擅长。

前保险杠外壳下面,是一块进深较大的护板,再往里,机仓部分没有下护板,可以看到框式副车架,两根粗大的钢梁,一左一右。副车架通常有两种形式。第一是元宝梁式,这种形式较为简单,有节省材料、降低自重的优点;第二是框式,结构较为复杂,重量较大,但有助于提升安全与操控。

昂科威的前悬架是麦弗逊式,部件采用铝合金制品,目的是降低自重,有利于前、后车轴的配重。说到重量分配,对汽车不了解的人,往往误以为只有追求操控的高级性能车,才会做到前、后轴载荷平均分配,可实际上,做到此点的车不在少数。在满载状态下,昂科威的前、后轴载荷分别为1175千克和1100千克(无负载情况下,前、后轴载荷分别为1050千克和750千克)。

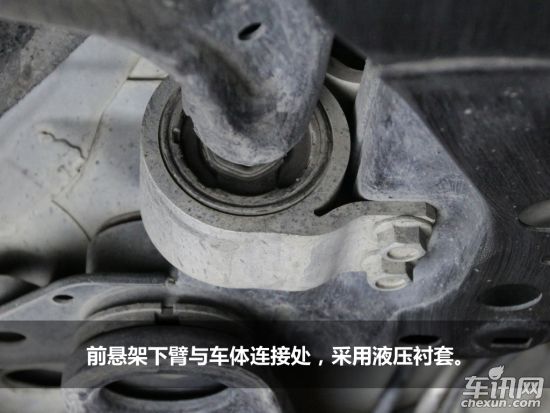
昂科威的前悬架下臂与车体连接处的衬套,一反极为常见的橡胶制品,采用了液压衬套,外壳为铝合金制品。液压衬套的应用,对于降低振动来说,无疑会起到促进作用。
昂科威的油箱容积为66公升,布置在车子的中部,呈马鞍形,驱动轴从中间通过,为了保护油箱,前、后车轮之间的区域,一左一右布置了两根钢条。


昂科威的后悬架为典型的多连杆独立悬架,一粗两细,3根横臂从侧面支撑着车轮,纵臂虽然只有一根,但同样很粗壮。虽然仅凭目视得不到客观结论,外观的粗与细不能证明悬架的好与坏,但支撑杆粗大一些,在烂路上的保障就会好一些,总该不会有错。



对君威GS进行测试的时候,主动减振器给我们留下深刻印象,这次在昂科威车中,又一次看到了它的存在。正是由于减振阻尼可调,在昂科威的中控台上,有旅行、越野、运动3种驾驶模式可供选择。

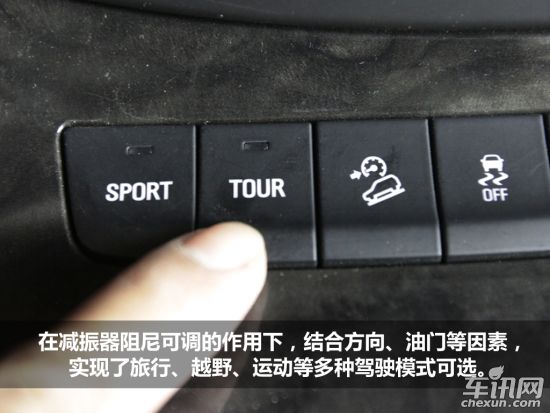
结论:美国车的典型特征是悬架特别舒适,但不适合激烈驾驶。昂科威的主动减振则把两种风格迥异的悬架合二为一。
第五,看看四驱。
只要不是纯种越野车,四驱通常都是由电子、液压部件构成,虽然都叫四驱,但性能截然不同。比如,某款SUV配备液力耦合四驱,其后轮所获得的动力,无论是时间还是扭矩,都较为有限。而另一款SUV,配备了电动离合器形成的四驱,效果好一些,但遇到较陡的坡道,依旧无能为力。
在已经上市的4款昂科威中,存在2种模式的四驱结构,第一是智能四驱,第二是全路况智能四驱。这是厂家的语言,简单描述,第一种是单离合器,第二种是双离合器。

在《车讯实验室》以往测试过的SUV中,性能比较不错的,是一种电动+液压构成的四驱,它的原理是通过电子泵,对油加压,然后通过油控制多片离合器,压力大,向后轮传输的扭矩就大。而电子泵的工作,取决于车轮传感器传来的数据。如果侦测到4个车轮转速不一,即意味着打滑出现,控制单元根据转速差的大小,决定电子泵的工作,决定往后轮输送多少扭矩。这个工作过程用语言说了一大堆,可真正动起来,只是一瞬间的事儿。当我们在58%(30度)的土质坡道上,对装备着这种四驱的途观进行测试时,它能很轻松地完成,而且还能在坡中停车,再起步。而昂科威的单离合器四驱,就是这种模式的四驱。

不过,任何汽车的左右车轮之间,都会有差速器,不然汽车就没法转弯,可当某一车轮出现打滑时,动力就会被它消耗掉,没有打滑的车轮无法获得动力。这就是汽车在冰、雪、沙、泥等路段,步履维艰的原因。为此,纯种越野车都会安装“锁”,将差速器“锁”起来,相当于左右车轮在同一根车轴上一起转。事实上,绝大多数SUV都不是纯种越野车,也就是说,遇到这种情况,它们跟普通轿车一样,无计可施。
为了解决这个问题,昂科威旗舰车型配备了双离合四驱——在后桥通往左、右车轮的地方,一边儿安装了一套多片离合器,靠电子泵驱动油动作,故称双离合器四驱。这样一来,左右车轮可以独立控制,这边儿打滑了,就把动力百分之百地传给那边儿。

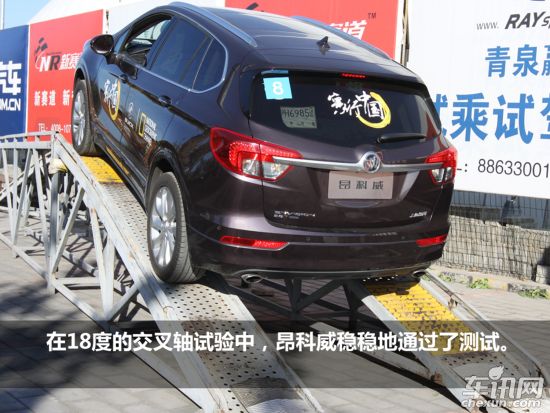
为此,我们进行了2个试验:第一是在18度的坡道上,布置了2组滑轮,让左前轮和右后轮同时打滑,结果,昂科威顺利地通过了测试。而在这个坡道上,途观就未能通过测试。
第二是在46%(25度)的铺装坡道上,驾驶昂科威从坡底起步,无助跑爬坡,结果,同样很顺利地完成了测试,并能完成坡中停车的再起步。顺便说一句,在昂科威的随车手册中,标明该车的爬坡能力为大于30%。

当然,昂科威不是纯种越野车,这套系统更大的价值,并非越野,而是提高操控。出于节油的目的,在平坦的公路上行驶时,动力提供给前轮,如果试图高速过弯或遇到某一车轮打滑时,多片离合器能在瞬间接通,将动力传给后轮,或者是左后轮、右后轮中的某一个。会滑雪的朋友对此更有体会,当某一车轮单独获得更多的扭矩,就能不靠导向轮的作用,直接实现转弯。
结论:事实上,昂科威的四驱,最大价值是为了安全的保证与乐趣的提供。










 凌乱心情
凌乱心情










