新能源情报分析网
新能源情报分析网
2020年10月10日,央视对解放军进行的一场登陆演习的军事报道中首次亮相1款8轮驱动、4摇臂式悬架、遂行战场辎重勤务输送任务的“龙马2号”高机动无人驾驶(有人遥控)越野车。新能源情报分析网自2008年专注与新能源技术军用化展的延展,在2016年对国内诸多科研院校、整车制造厂商的新能源技术军用化、战场环境的无人驾驶技术和控制策路进行持续跟踪报道。

将在央视登陆演习视频中“龙马2号”高机动无人越野车前部LOGO放大后,几乎可以识别出“跨越险阻-2018”地面无人挑战赛等信息。

“跨越险阻-201X”地面无人平台挑战赛由陆军装备部主办,旨在加快陆军地面无人装备研发步伐,促进各高校、科研机构、企业的无人智能技术快速发展并转向实战化。而2016年举办的“跨越险阻-2016”赛事在黑龙江省塔河举办,有来自中国科学院、中国兵器工业集团、北京理工大学、国防科技大学等44个单位的99个车队参与。
备注:本文仅通过央视视频截图和公开发布网络的相关信息对“龙马2号”高机动无人越野车技术解读,最终技术状态还以官方发布信息为准。

在2020年9月25日,在襄阳举办的2020中国汽车工程学会越野车技术分会暨中国特种车辆与防务技术大会,不仅首次展出“短头”猛士全封闭载员巡逻车技战术,还有多款高附加值轮式装甲车辆。来自北汽、东风和陕汽等车厂军品部门负责人,以及国内的特种车辆企业、研发中心、高等院校等领导、零部件配套企业的专家和代表600余人参加参与本次大会,共同讨论中国特种车辆与防务技术的现状与发展趋势,旨在为中国特种车辆和防务技术提供学术理论依据和发展方向指导。
在此次大会上,来自多家科研院校和整车厂商,展现出不同技术状态的无人驾驶技术装备于控制策略构想和实际应用。可以说,中国汽车工程学会越野车技术分会暨中国特种车辆与防务技术大会,已经成为引领整个中国军警用轮履装备与新能源驱动技术、无人驾驶控制策略发展的最前沿。

这款名为“龙马2号”高机动无人越野车由山河智能装备股份有限公司研发并制造,早在2018年就参加了“跨越险阻-2018”地面无人平台挑战赛。“龙马2号”高机动无人越野车具备翻阅1200mm高度垂直障碍物、具备跨越2000mm长度的壕沟、最大越野速度35公里/小时;采用机电液一体化驱动技术且第1、4驱动桥摆臂可以进行高度调整,适用于山地、丘陵、沟壑、高大山脉、沙漠荒原、雪原冰川等环境中承担物资运送任务。
1、“龙马2号”高机动无人越野车无人驾驶状态和有人控制状态的技术解读:
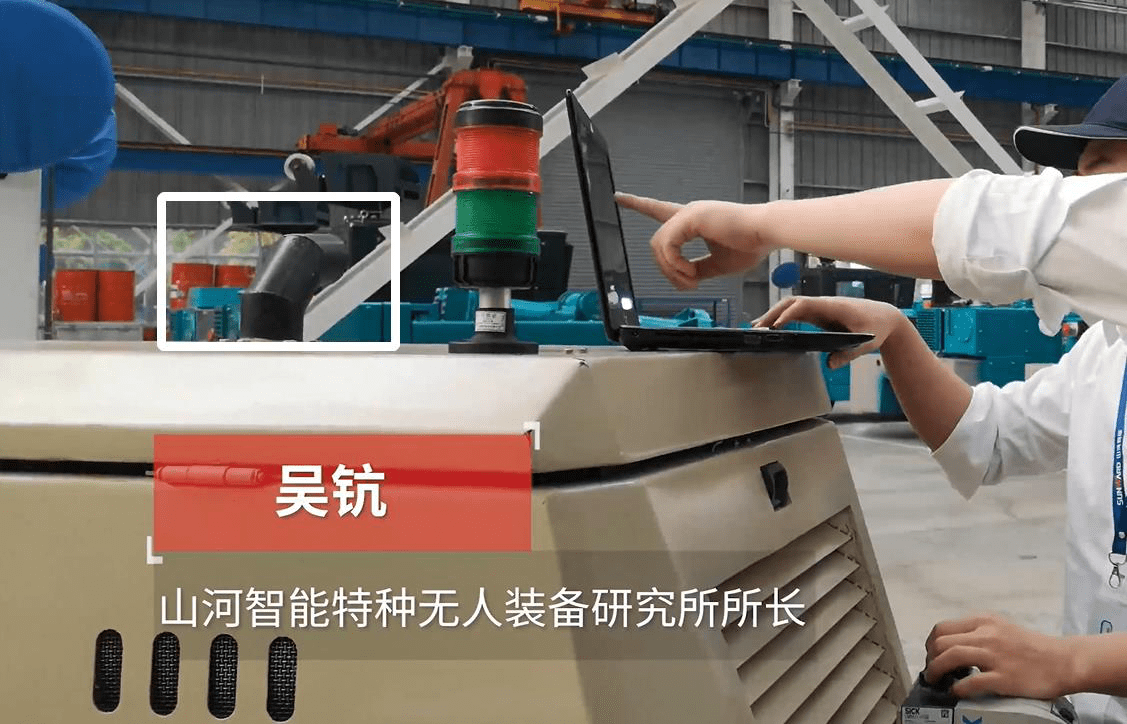
需要注意的是,参加2018年开展的“跨越险阻-2018”赛事和2020年10月参加解放军登陆作战演习中的“龙马2号”高机动无人越野车,采用的是有人遥控及相关技术设定。2019年4月“掌上长沙”发布的《青年工匠吴钪:主导研制“龙马二号”,蝉联比赛冠军》视频中展示的“龙马2号”高机动无人越野车,装备了用于无人驾驶和自主导航控制的激光雷达。
以下为2018年“跨越险阻-2018”赛事中“龙马2号”有人控制系统技术状态:

上图为“龙马2号”在参加2018年的“跨越险阻-2018”地面无人装备挑战赛事中,载具前部技术状态细节特写。
在前部动力舱盖顶端设定的黑色管路十分清晰,具体功能在后文介绍。位于进气格栅上端设定1组单通道摄像机;位于第1驱动桥摆臂固定端设定1组毫米波雷达和超声波雷达探头。
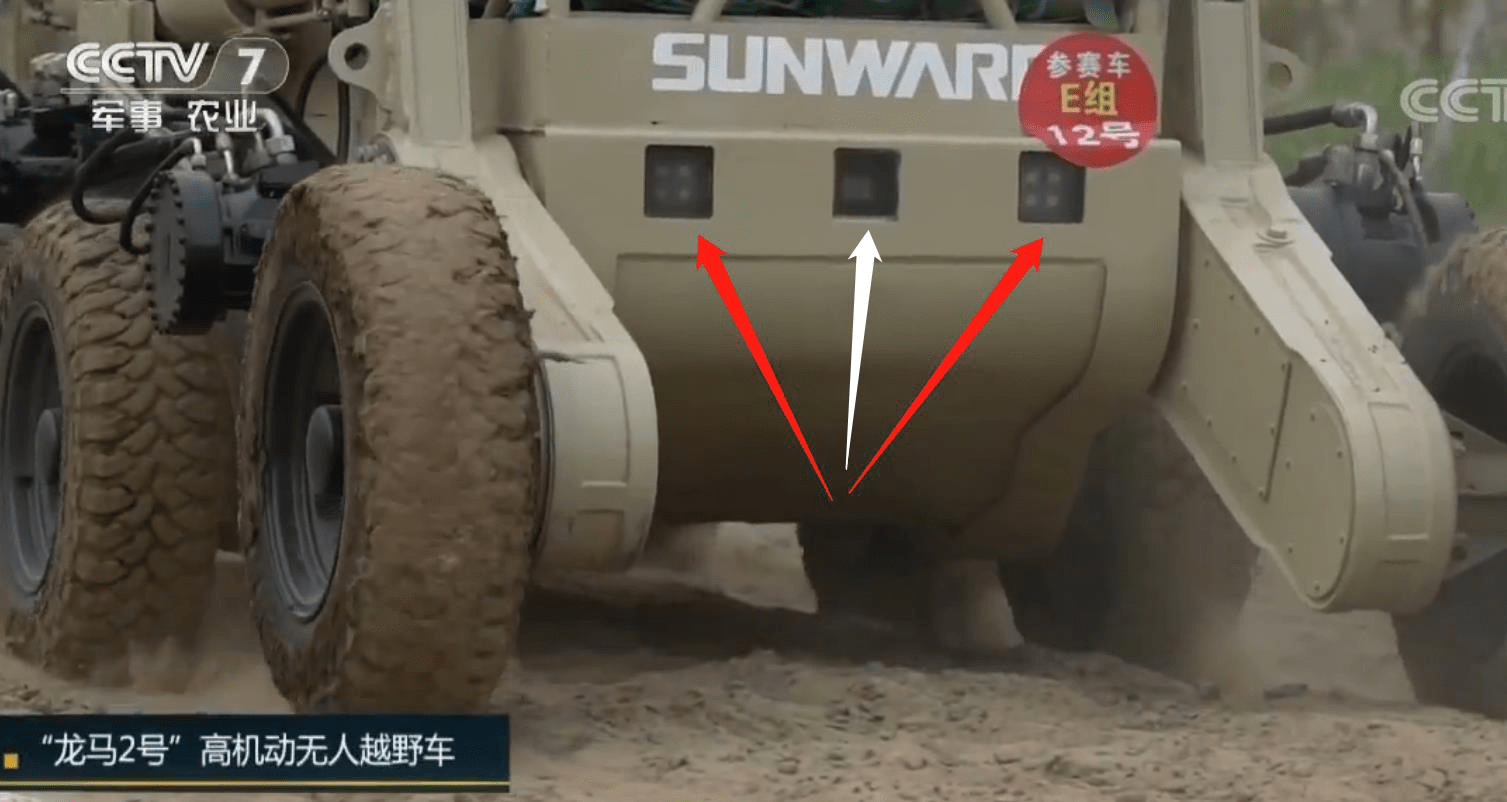
上图为“龙马2号”在参加2018年的“跨越险阻-2018”地面无人装备挑战赛事中,载具后部技术状态细节特写。
白色箭头:毫米波雷达
红色箭头:两侧各设定1组超声波雷达探头

在参加跨越险阻-2018”地面无人装备挑战赛事中,“龙马2号”完成赛事要求的全部机动科目过程中,全部依靠有人操控进行。上图中红色区域为工作人员通过1组控制台对“龙马2号”发出前进、转向、第1、4驱动桥摆臂高度调整指令。
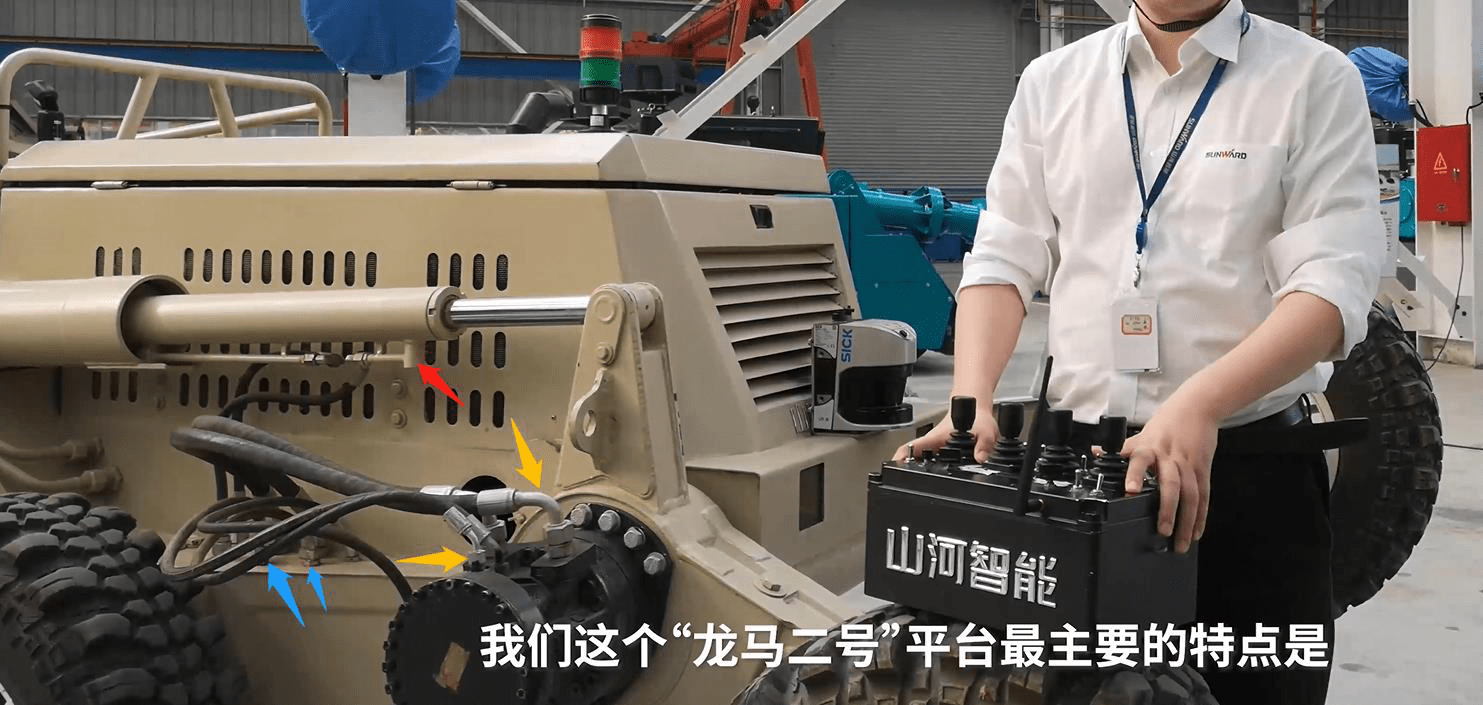
以下为2019年4月《青年工匠吴钪:主导研制“龙马二号”,蝉联比赛冠军》视频中展示的“龙马2号”无人控制技术状态:
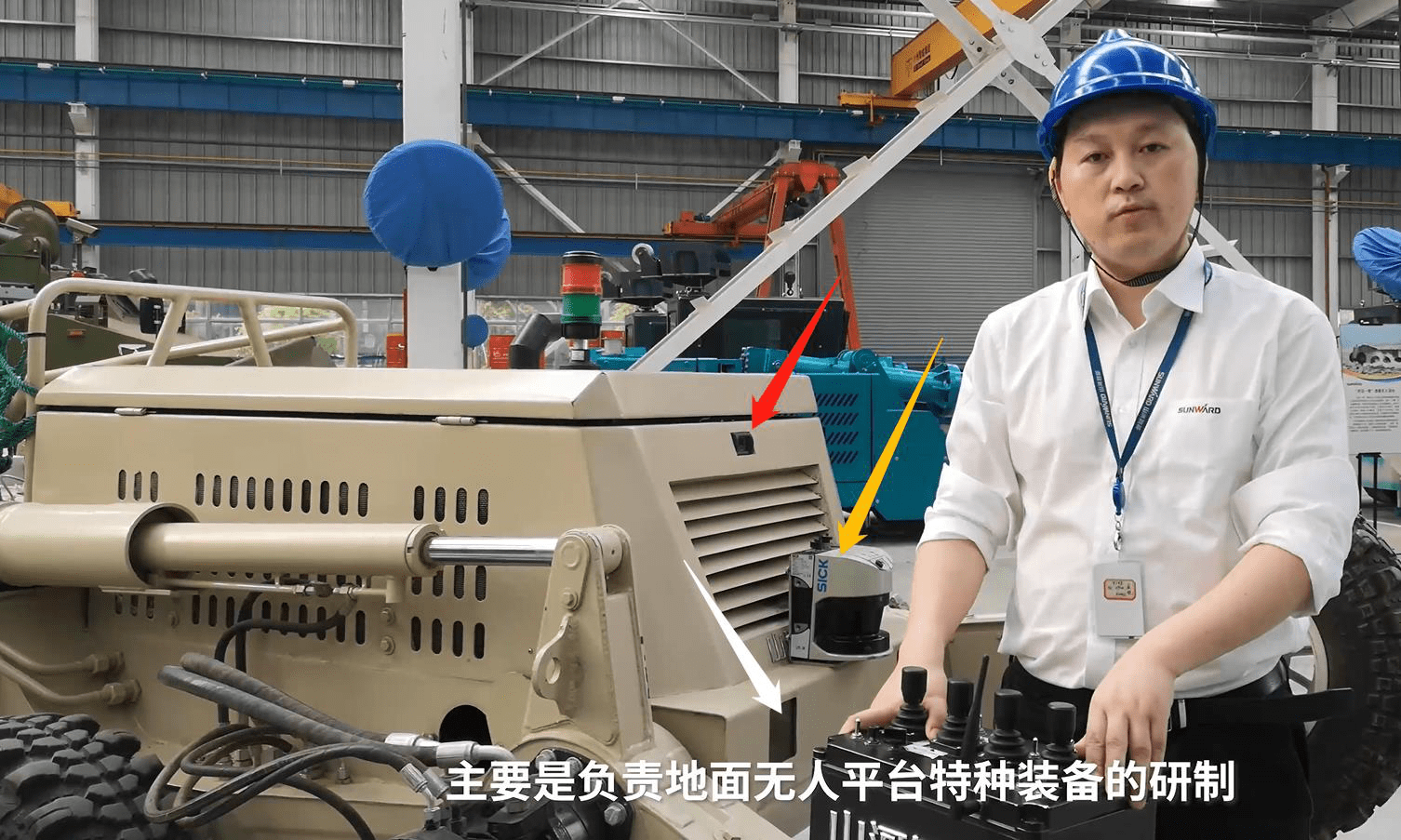
在网络上搜索“龙马2号”关键词,即可观看介绍载具设计人员的相关视频。在这组视频中,“龙马2号”的车身焊接最前端设定1组由德国SICK制造的LMS系列宽幅激光雷达组件。而没有设定任何“遮蔽”或“装饰”的摄像机布置在进气格栅上端。
红色箭头:内嵌在进气格栅上端的单通道摄像机
黄色箭头:德国SICK品牌LMS系列宽幅激光雷达
白色箭头:左右各设定1组超声波雷达探头
需要注意的是,这组在2019年发布的视频中,“龙马2号”在位于前部进气格栅下端固定的SICK品牌的LMS系列激光雷达,采用以太网传输实时信号,可用于户外恶劣的气候,采用多次回波技术,可探测前方20-80米以及扫描190-270度车辆与行人,拥有IP67防护等级,内部集成加热器应对恶劣气候的加热系统。
换句话说,“龙马2号”没有装备2020年普遍采用的顶置360度激光雷达具备的周视扫描能力。这组SICK品牌的LMS系列激光雷达只具备190-270度正向宽幅面扫描能力。
以下为2020年10央视视频中参加解放军登陆演习中“龙马2号”最新自主导航伴随技术状态:
感谢视频截图作者微博注册用户@电波震长空XYY
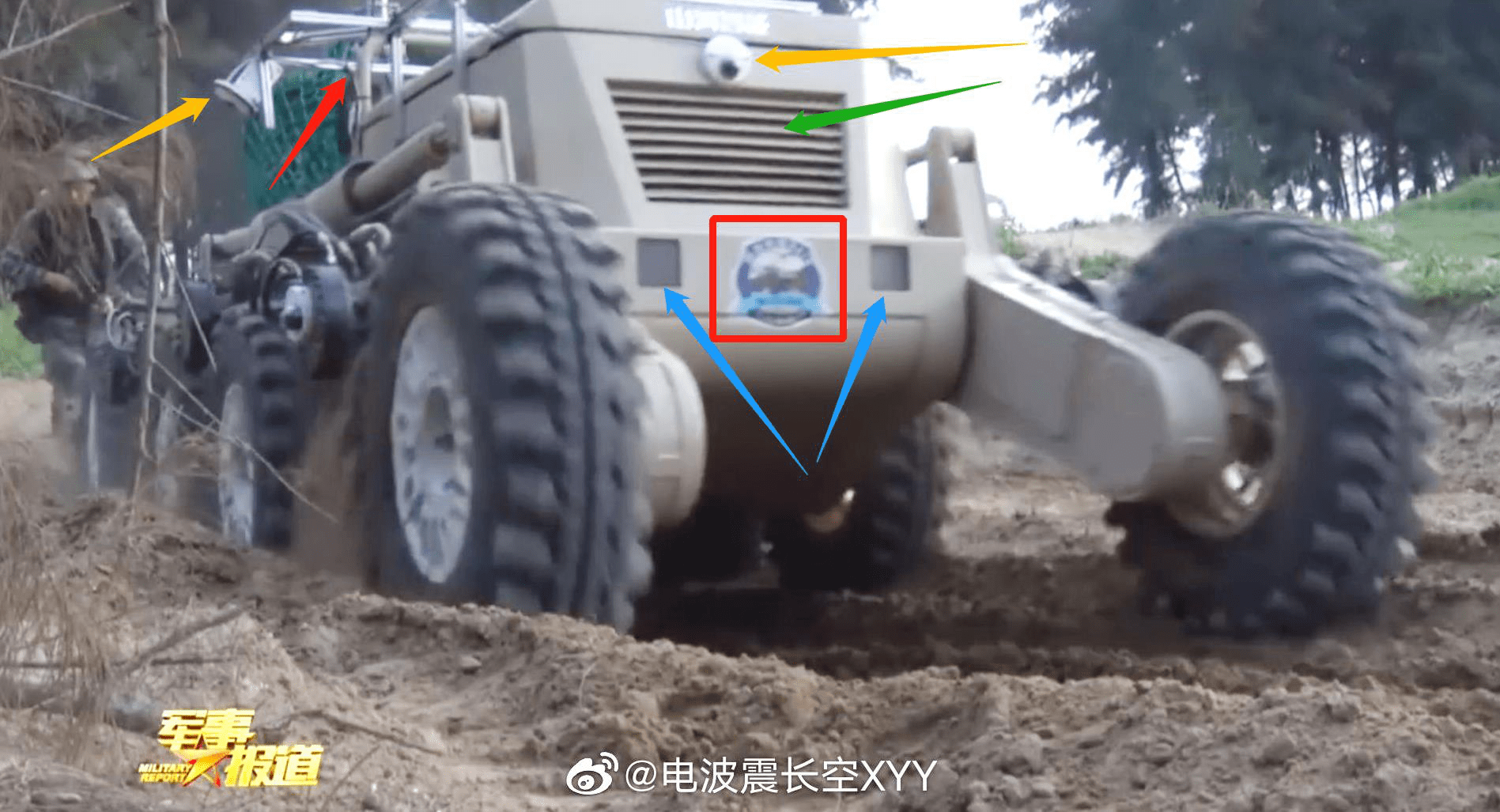
在2020年10月10日央视军事报道视频截图中清晰可见,“龙马2号”高机动无人越野车(后文简称“龙马2号”)前端、两侧以及顶端分别布设了视频感知系统。
黄色箭头:位于车身焊接正向、左侧各设定1组单通道摄像机(右侧也应该设定1组)
红色箭头:位于车身焊接中部安装1组铝合金材质的框架疑似用于固定定位系统天线、区域网络传输天线以及周视激光雷达
蓝色箭头:位于车设焊接正向,或内置2组前照灯
绿色箭头:前置散热格栅用于为动力总成及控制系统散热
红色区域:在车身正向显著为主粘贴1组标识

比对视频截图中“龙马2号”在登陆演习中全景状态,顶置了1组由疑似360度全向激光雷达(红色箭头所指)+多通道视频信息收集系统构成的组件,并设定2组通讯天线(红色箭头所指)。
相对2019年“龙马2号”前置190-270度激光雷达的无人驾驶系统状态,2020年“龙马2号”顶置疑似具备360度周视扫描的激光雷达的无人驾驶技术控制效率更高。
在狭小的车身焊接内燃油驱动、全电驱动或油电混合驱动动力总成,将会在后文重点解读。然而基于无人驾驶或有人遥控系统优先保障的考虑,采用全电驱动的线性控制的技术架构,便于进行无人化的发展。而针对整套系统自重、载荷等关键数据,以及用于跟随登陆部队徒步向前艳阵地纵深机动,提供辎重补给任务,轻量化与低辐射是必须的。
扩展阅读1:

2016年4月,新能源情报分析网发布《无人驾驶与智能控制技术的军用与民用》一文。就长安汽车在基于 长安悦翔和长安睿骋燃油车基础上,加装无人驾驶技术与智能控制策略的实际表现与应用。红色箭头所指的就是长安睿骋在前保险杠下端加装的SICK品牌的LMS系列款激光雷达。

这台长安睿骋燃油车在2016年4月完成了从重庆至北京,经过多条高速公路从重庆前往北京,以“真-无人驾驶”状态(保留驾驶员进行紧急状况干预)进行超2000公里的实际测试。
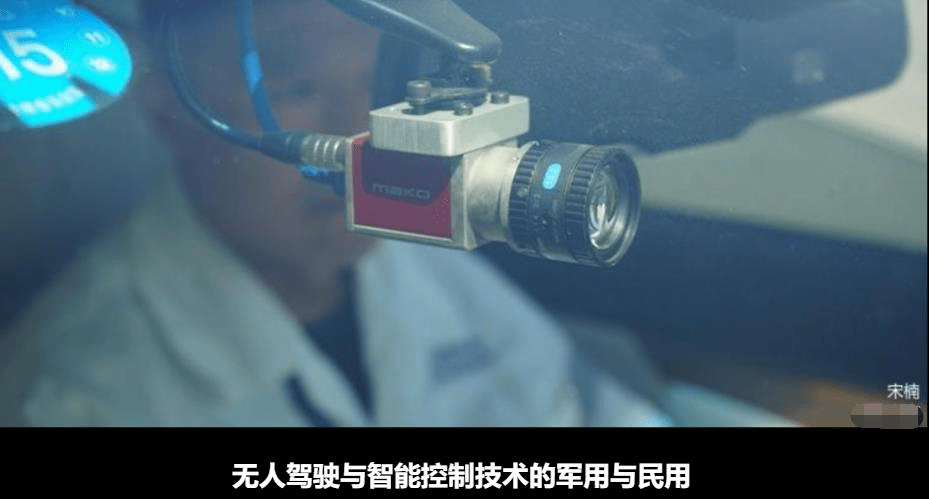
这台基于SICK品牌的190-270度激光雷达的长安睿骋燃油车,保留了原型车搭载的汽油机和自动变速器同时,加装GPS导航系统和前置单通道摄像机,但没有加装毫米波雷达。

加装非周视激光雷达后的长安睿骋在自动驾驶模式最高车速突破40公里/小时,可以在分道线划分清晰的开放道路进行了转向、加速、减速、十字路口判断红绿灯、跟随前车缓慢行驶并超越绕行、以及避让行人(斑马线)等动作。
结合在2018年-2019年-2020年3个时间段出现,2种有人遥控和1种自动驾驶技术状态的“龙马2号”车型相关分系统的变化,2016年长安睿骋无人驾驶车辆装备的相关技术和控制策略比对,“龙马2号”具备有人遥控和无人控制双重控制策略。在2018年和2020年两次出现的“龙马2号”都采用有人遥控技术完成赛事和演习所需的诸多科目。
鉴于采用汽油机+自动变速器+线性控制驱动模式的长安睿骋,加装与“龙马2号”相同类型的SICK品牌190-270度激光雷达和单通道摄像机构成有限度无人驾驶能力。在不同场景下,“龙马2号”具备采用基于毫米波雷达+超声波探头+视频采集系统,完成有人遥控功能的实现;采用定制周视360度激光雷达(最新状态),或前置270度激光雷达(早期状态),与毫米波雷达+超声波探头+更完善的视频采集系统,达成在复杂环境下基于自主控制的无人驾驶技术解决方案的战术实用化。
2、“龙马2号”高机动无人越野车驱动技术解读:
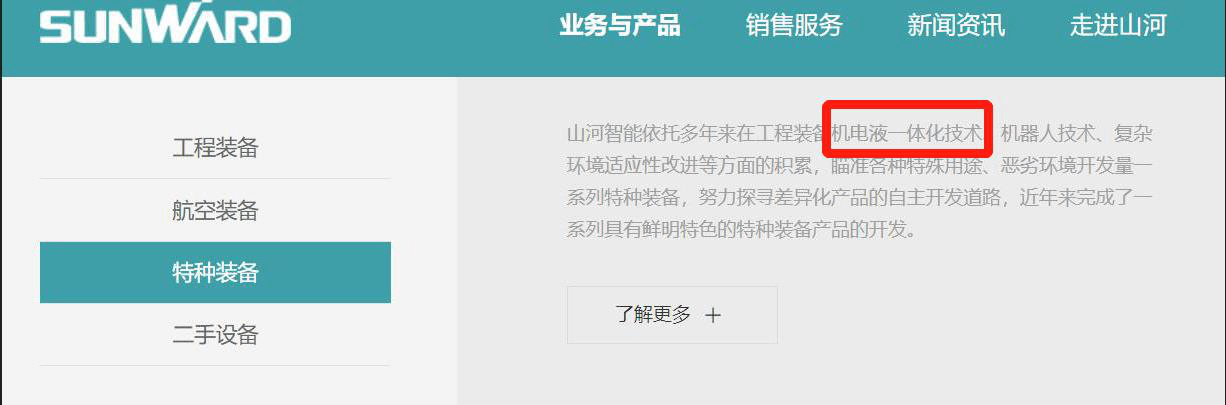
在“龙马2号”高机动无人越野车制造商,山河智能装备股份有限公司主业的特种装备产品介绍栏目中显示:“山河智能依托多年来在工程装备机电液一体化技术、机器人技术、复杂环境适应性改进等方面的积累,瞄准各种特殊用途、恶劣环境开发量一系列特种装备。。。。。”
在2018年、2019年和2020年三个时间段不同场合出现的“龙马2号”高机动无人越野车,都在前部动力舱盖上端安装了1组排气管路(白色区域),几乎可以确定用于柴油机运转。
通过对《青年工匠吴钪:主导研制“龙马二号”,蝉联比赛冠军》视频中出现的“龙马2号”高机动无人越野车侧向的悬架细节研读,在第1和第2驱动桥间、在第2和第3驱动桥间、在第3和第4驱动桥间,分别设定6组(3+3)外置液压阀(泵)体或驱动电机。而每组外置阀(泵)体或驱动电机又有起码3组电力线缆和高压管路关联。
红色箭头:用于驱动第1驱动桥摆臂角度的可调行程油压缸体(横向伸缩)
黄色箭头:固定在第1、2驱动桥间的外置液压阀体或驱动电机的高压线缆
蓝色箭头:固定在第1、2驱动桥间的外置液压阀体或驱动电机的电力线缆
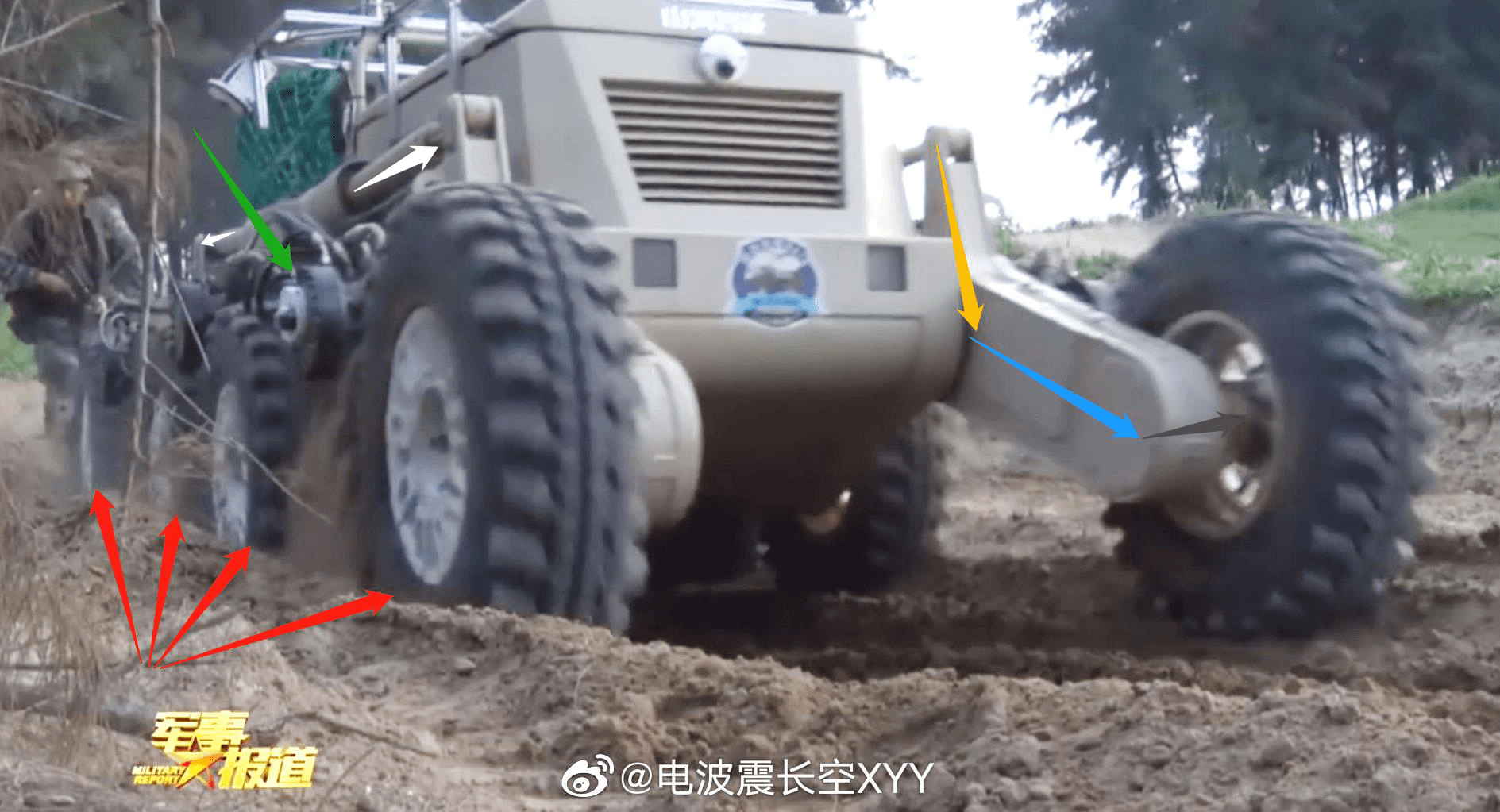
感谢视频截图作者微博注册用户@电波震长空XYY
新能源情报分析网注意到,在2020年10月10日央视视频中,“龙马2号”高机动无人越野车采用大尺寸越野用轮胎行驶在路况松软的沙土地面。第1和第4驱动桥采用可调节高度的摆臂+外置可调行程的液压减震系统;第2和第3驱动桥采用固定高度且不具备减震的架构,且在第2、3驱动桥间设定1组外置液压阀(泵)体或外置驱动电机。
红色箭头:全部8条驱动轮处于全时驱动状态
白色箭头:固定在车身焊接之外的平衡减震系统,用于主动提升第1、4驱动桥摆臂的角度
黄色箭头:与平衡减震器套筒关联的摇臂式悬架(支臂)
蓝色箭头:在摇臂内置的传动半轴用于输出扭矩至轮边
绿色箭头:疑似输出大功率扭矩用于驱动的外置液压阀体或驱动电机

上图为跨越障碍时,“龙马2号”高机动无人越野车(右侧)第2、3组外置液压阀(泵)体或驱动电机及相关管路细节状态特写。
红色箭头:固定在车身焊接的第2组外置液压阀(泵)体细节或驱动电机特写
黄色箭头:固定在第4驱动桥摆臂外侧的液压阀(泵)体细节或驱动电机特写
需要特别注意的是,“龙马2号”首先具备8组驱动轮全部与地面接触并输出动力的驱动模式;其次具备第1、4驱动桥摆臂放到最低姿态,第2、3驱动桥悬空的第1种技术状态的4组驱动轮输出动力的驱动模式;以及具备第1、4驱动桥摆臂放到最高姿态,第2、3驱动桥与地面接触的第2种技术状态的4组驱动轮输出动力的驱动模式。

在以第2种技术状态的4组驱动轮输出动力的驱动模式时,第4驱动桥的2组驱动轮仍然输出动力应对跨越垂直障碍。
不过根据对相关视频中“龙马2号”在不同驱动模式下行驶姿态研读和判定,处于2种技术状态的4轮输出动力模式,其他4组驱动轮依旧处于“空转”状态,仍然具备扭矩输出状态。
通过这一系列驱动轮状态和不具备转向机构等技术状态解析,“龙马2号”起码可以确定的是采用全时8驱且轴间差速转向的技术解决方案。而不能确定的是,“龙马2号”8组驱动轮采用液压驱动,还是全电驱动以及全部动力采用纯粹的燃油发动机,EV驱动,还是增程式油电混合驱动。

上图为“龙马2号”高机动无人越野车的第1、4组驱动桥摆臂的外置可调节程的油压减震器被拉伸至最大行程状态,第2、3驱动桥4组驱动轮被“驾空”的第1种技术状态的4组驱动轮输出动力的驱动模式。
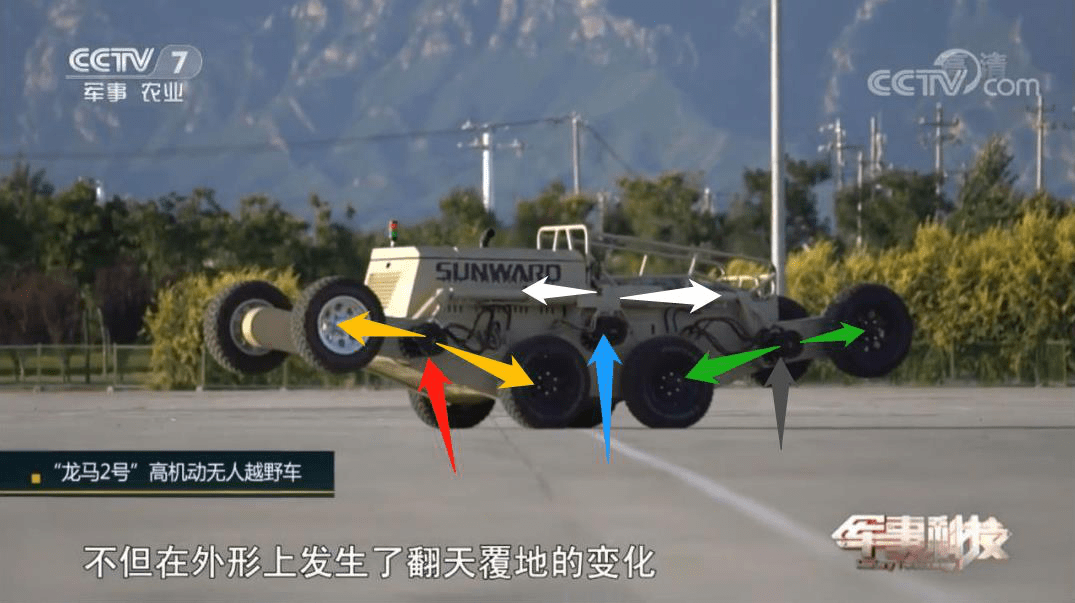
上图为“龙马2号”高机动无人越野车的第1、4组驱动桥摆臂的外置可调节程的油压减震器被压缩至最小行程状态,只有第2、3驱动桥4组驱动轮着地行驶的第2种技术状态的4组驱动轮输出动力的驱动模式。
红色箭头:负责第1、2驱动桥的第1组外置液压阀体或驱动电机
黄色箭头:从第1组外置液压阀体或驱动电机通过2组传动半轴负责第1、2驱动桥驱动
黑色箭头:负责第3、4驱动桥的第1组外置液压阀体或驱动电机
绿色箭头:从第3组外置液压阀体或驱动电机通过2组传动半轴负责第3、4驱动桥驱动
蓝色箭头:第2组外置液压阀体或驱动电机负责第2组外置可调行程的液压减震器的伸缩动作
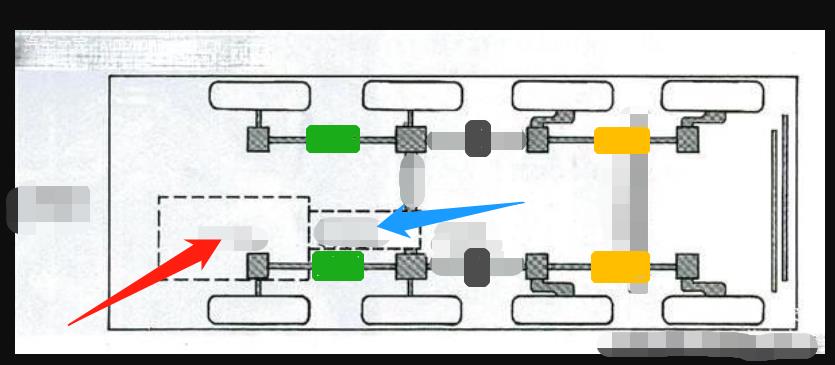
上图为新能源情报分析网结合“龙马2号”高机动无人越野车的2018年、2019年和2020年三个时间段载具系统状态综合研判的驱动系统简图。
红色箭头:柴油发动机(内燃机)
蓝色箭头:发电机
绿色区域:通过2+2组传动半轴向第1、2驱动桥(4组驱动轮)输出扭矩的第1组外置液压阀体或驱动电机
黄色区域:通过2+2组传动半轴向第3、4驱动桥(4组驱动轮)输出扭矩的第3组外置液压阀体或驱动电机
黑色区域:通过2组外置液压阀体或驱动电机向左右各1组外置可调节程的油压减震器输出动力负责第1、4驱动桥摆臂姿态调整

“龙马2号”高机动无人越野车只有第1、4驱动桥的摆臂进行一定幅度的高度调节,第2、3驱动桥完全固定在车身焊接且不具备高度调节。无形中降低了整车具备大幅运动的机构复杂程度。
因此,新能源情报分析网更倾向于“龙马2号”高机动无人越野车采用增程式油电混合驱动技术,并且内燃机将一部分动力用于伺服第1、4驱动桥外置液压缸体;一部分动力通过发电机转化为电力,用于驱动6组外置液压阀体或驱动电机,负责载具行进。
首次亮相于“跨越险阻-2018”地面无人装备挑战赛事的“龙马2号”高机动无人越野车,因为差速转向功能的设定,每侧4组驱动轮势必要进行单独驱动。结合“龙马2号”的具备的1种8X8驱动、2种4X4驱动模式中的驱动轮状态,极有可能采用的是外置3+3组驱动电机,而不是液压阀体。
扩展阅读2:

上图左侧为摇臂式6驱军用无人突击装备第3驱动桥的轮边传动系统细节特写。1组轴间电机+3组差速器+3组传动轴,用于单侧3组驱动轮扭矩传递;3组传动半轴设定在3组摇臂内,将动力输出至轮端。
上图右侧为“龙马2号”高机动无人越野车第1驱动桥的轮边传动系统细节。轮圈与轮毂之间存在“浪费”较大空间,理论上可以用来布置功率更大的轮边电机。

无论摇臂式6驱军用无人突击装备,还是“龙马2号”高机动无人越野车,如果换装轮边电机起码在驱动模式上会更多样性,也带来了更好的机动性。换句话说,以2018年中国新能源全产业链状态看,已经具备量产用于2吨级乘用车,最大输出功率180千瓦级“3合1”电驱动系统。但是,这种主要用于轴间驱动的电机,但受限于簧下质量和尺寸都不能布置在对空间要求高的轮端位置(轮毂内)。
用分布式电驱动来解决多轴车复杂的车桥结构与机械传动效率低,已经是业界普遍认同的方式。分布式驱动系统分为轮边驱动、轮毂驱动,这两种方式一字之差,却又天壤之别,轮边驱动保住了性能,但车辆空间利用率存在瑕疵,轮毂电机空间利用率高、通过性好,簧下质量却很难突破,针对这个情况,国内各知名高校、电驱动供应厂商都已经开始对电机的工艺、结构进行深入研究,寻求更小的体积、更低的自重以获取更大的功率密度,风靡汽车圈的扁线电机或许能带来一点帮助。
至2018年,国内就有厂商突破国外生产设备封锁,推出基于扁线绕组的驱动电机及成熟的车载解决方案,电机工艺走在世界前列,参数超过现有进口在售产品。在狭小空间内就能最大程度提升车辆性能。扁线电机的效率也较传统电机更高,更重要的是,采用扁线电机能为电动轮中的减速、刹车结构争取宝贵的轴向空间。
相信,随着小型化、轻量化和高效化的轮边电驱动系统的普及,获将在“跨越险阻-2020”地面无人装备挑战赛中,将会出现更加贴近实战需求的载荷更大、通过性更好的全电驱动无人驾驶武器系统。
3、“龙马2号”高机动无人越野车战术解读:

在2018年“跨越险阻-2018年”地面无人装备赛事中,“龙马2号”高机动无人越野车后部设定的运输平台满载符合,完全部赛事并获得优秀名次。

在2020年10月10日播放的央视登陆演习视频中,全副武装的步兵跟随在“龙马2号”后部向“岛”内纵深前进。“龙马2号”的后部也“满载”用于后勤补给的辎重。
“龙马2号”高机动无人越野车并具备主动攻击的能力,但是在诸如登陆作战等“实用场景”下,通过无人驾驶与有人遥控的方式,伴随突击步兵提供行进间防护、弹药和淡水等必备的运输和不及确是一种全新的战术。
笔者有话说:

在2018年举办的“跨越险阻-2018”地面无人系统挑战赛中,不仅出现了由北汽(蓝色箭头所指)、东风(黄色箭头所指)、陕汽和一汽等厂商制造的现役军用装备改型而来的轮式无人装备,还出现了由现役履带装备改型,具备更具实战应用的履带式无人驾驶攻击系统(红色箭头所指)。而采用摇臂式轮式无人装备,依旧是参赛主力类型。
相对“跨越险阻-2014”和“跨越险阻-2016”赛事中采用燃油驱动装备为主,“跨越险阻-2018”赛事中的更多装备切换为增程式油电混合与全电驱动。
首次在登陆作战演习中亮相的“龙马2号”高机动无人越野车,显性的用途为跟随和保障,隐形的内容传达出军队已经十分重视无人驾驶和新能源技术军用化,为实战带来的多元化战术实施的灵活性。
遗憾的是,截止2020年10月10日在央视军事频道出现的“龙马2号”高机动无人越野车,依旧处于2018年时“跨越险阻-2018”赛事,采用结构复杂的传动半轴+驱动电机系统。
如果在2018年-2020年期间,换装结构更为紧凑,效率更高的轮毂电驱动系统;强化增程式油电混合驱动系统的动力电池能量密度(降低自重提同时再次升能量密度);增加集群跟随功能的无人驾驶技术控制策略;将使“龙马2号”高机动无人越野车的战术打击能力从保障登陆辎重补给战术能力,向具备登陆后遂行高强度城市巷战防护与打击能力的重要提升。
新能源情报分析网评测组出品

 车讯网
车讯网